Projectinformatie
Projectpartners overheid: SBO
Projectpartners privé: AIRobot, Colruyt Group, Corvus Solutions, dotOcean, DroneMatrix, IMR Systems, Intermodalics, Movanis, Octinion, Siemens Industry Software nv, WMI 2Drone project bv, Yamabiko
Projectpartners kennisinstellingen: Flanders Make vzw
Startdatum-Einddatum: 1/7/2019-30/6/2023
Samenvatting
Kader
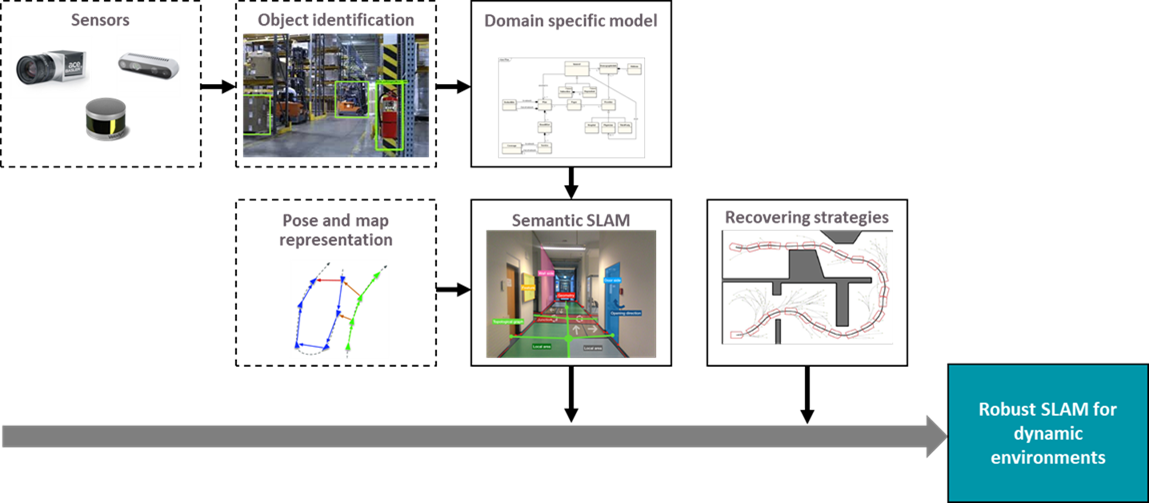
Simultaneous Location and Mapping (SLAM) is een techniek die door autonome mobiele systemen kan worden gebruikt om een map van de omgeving te maken met minimale of geen a-priori kennis van de omgeving.
Er is echter een zeer beperkte toepassing van SLAM voor praktische toepassingen in industrieën, omdat de omgeving meestal erg dynamisch is en de kaarten snel verouderd zijn. Dit kan mogelijk resulteren in een SLAM-systeem dat niet werkt en in kaarten waarop niet kan worden vertrouwd voor navigatie.
Doelstelling
Het doel van het project is om de robuustheid van het in kaart brengen en lokaliseren voor veranderingen in de omgeving te vergroten door semantische informatie (identificatie van pallets, mensen, …) aan het SLAM-proces toe te voegen.
Dit wordt geëvalueerd en vergeleken met de huidige stand van de techniek voor:
- een 3DOF-algoritme (met behulp van een automatisch geleid voertuig)
- een 6DOF-algoritme (met een drone)
De ontwikkeling in dit programma zal de aanpassing van SLAM in magazijnen en soortgelijke omgevingen vergroten en als zodanig:
- installatiekosten verlagen (vergeleken met vaste lokalisatie-hardware)
- menselijke interventiekosten voor het deblokkeren van de autonome voertuigen verlagen
- zorgen voor up-to-date kaarten (zelfs wanneer continue objectbewegingen optreden)
Nieuws over dit project
Geen Resultaten Gevonden
De pagina die u zocht kon niet gevonden worden. Probeer uw zoekopdracht te verfijnen of gebruik de bovenstaande navigatie om deze post te vinden.